
近日,中国科学技术大学计算机学院陈小平团队运用气动蜂巢网络软体执行器在软体机器人研究领域取得重要进展,发展了气动蜂巢网络软体执行器的一种新的设计和分析方法。相关成果以Design and Simulation Analysis of a Soft Manipulator based on Honeycomb Pneumatic Networks为题在2016 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2016)报告并获得大会唯一的最佳论文奖(Best Conference Paper Award)。
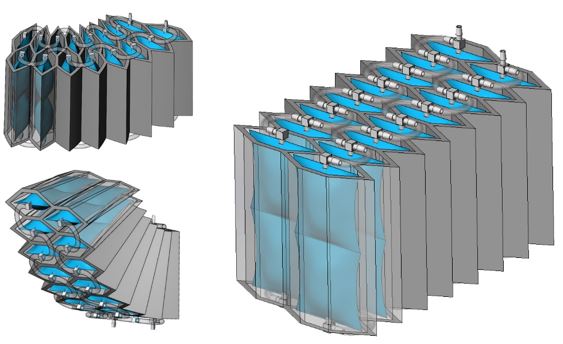
以传统工业机器人为代表的刚性机器人受制于负重比低、柔性度差等先天局限,难以充分满足服务机器人、智能制造机器人等市场空间巨大的新领域的应用需求。软体机器人研究在短短几年内成为机器人源头技术竞争的一个战略制高点。气动蜂巢网络是一种“天然的”刚柔合一结构,兼具大形变性、高灵活度、高负重比和低成本四大特性,为消除刚性机器人的本质局限性开辟了一条具有巨大潜力的新途径。作为我国在本领域的首批论文之一,该团队于2013年发表的第一篇气动蜂巢网络论文即引起国内外同行的关注。在本次IEEE ROBIO 2016上,该团队又报告了气动蜂巢网络软体执行器的一种新的设计和分析方法:针对软体执行器性能的两项核心指标——灵活度与负载能力,用非线性有限元分析法,系统地探索了软体执行器的设计参数对执行器性能的影响,并将仿真分析结果用于软体执行器的设计,结合实际应用场景制备了软体执行器样机。实验表明,该软体执行器兼具出色的形变度、灵活性和负载能力,可实现三维空间内不规则物体的操纵。
IEEE ROBIO由国际电气电子工程师学会(IEEE)主办,自2004年创办以来每年一届,与ICRA 和IROS并列为国际机器人领域最具影响力的三大国际会议。IEEE ROBIO 2016于12月3-7日在中国青岛召开,共接收来自29个国家和地区的459篇论文,从中评选出大会最高奖Best Conference Paper Award一篇,Best Student Paper Award二篇,Best Paper in Biomimetics Award一篇和T. J. Tran Best Paper in Robotics Award二篇。

该工作得到国家自然科学基金、教育部博士点基金和中央高校基本科研业务费专项资金资助。
(计算机学院、科研部)